h:De:Mess-Strategie: Unterschied zwischen den Versionen
Markus (Diskussion | Beiträge) K (→Erfassung unterwegs) |
Markus (Diskussion | Beiträge) (→Zur Technik) |
||
| (13 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
{|border="0" cellpadding="6" cellspacing="0" width="100%" | {|border="0" cellpadding="6" cellspacing="0" width="100%" | ||
| − | !style="background:#E3E3E3;" | [[ | + | !style="background:#E3E3E3;" | [[h:De:Mess-Strategie|Deutsch]] |
| − | !style="background:#E3E3E3;" | [[Measuring Strategy|English]] | + | !style="background:#E3E3E3;" | [[h:En:Measuring Strategy|English]] |
!style="background:#E3E3E3; width:100%;" | | !style="background:#E3E3E3; width:100%;" | | ||
|} | |} | ||
| Zeile 14: | Zeile 14: | ||
== Systematische Erfassung == | == Systematische Erfassung == | ||
| − | [[File:Wassertiefen Gübsensee 2013-10-11 z17 4x3.tif|thumb|Systematische Erfassung]] | + | [[File:Wassertiefen Gübsensee 2013-10-11 z17 4x3.tif|thumb|[http://map.openseamap.org/?zoom=17&layers=BFTTFFTFFTF0FFFFFTFF&lang=de&lat=47.39867&lon=9.31404 Systematische Erfassung] ]] |
Deinen Heimathafen und die Ansteuerung dazu erfasst du am besten systematisch. | Deinen Heimathafen und die Ansteuerung dazu erfasst du am besten systematisch. | ||
| Zeile 23: | Zeile 23: | ||
: fahre so nahe an das Ufer, wie es dein Tiefgang erlaubt | : fahre so nahe an das Ufer, wie es dein Tiefgang erlaubt | ||
: fahre so nahe an jede Untiefe, wie es dein Tiefgang erlaubt | : fahre so nahe an jede Untiefe, wie es dein Tiefgang erlaubt | ||
| + | : fahre parallele Linien im Abstand von 10..50m | ||
: markiere Untiefen auf der Karte | : markiere Untiefen auf der Karte | ||
| − | + | == Chaotische Erfassung == | |
| + | [[File:Wassertiefen-per-Crowdsourcing chaotisch z18.jpg|thumb|[http://map.openseamap.org/?zoom=18&layers=BFTFFFTFFTF0FFFFFTFF&lang=de&lat=48.91938&lon=8.17901 Chaotische Erfassung] ]] | ||
| − | + | In Gebieten wo viele Skipper unterwegs sind (beispielsweise an der Tankstelle in Palma, Mallorca), ergibt sich durch Crowdsourcing automatisch eine dichte Erfassung. An der Rändern der viel befahrenen Wege ist die Punktedichte naturgemäss geringer. Da hilft dann etwas [[#Systematische Erfassung|mehr Systematik]]. | |
| − | [[ | ||
| − | + | Lass am Liegeplatz, am Steg oder schwojend am Ankerplatz eine Punktewolke entstehen. Das hilft uns, die Daten zu kalibrieren. | |
| − | + | Wenn es in deinem Revier schon Mess-Tracks gibt: | |
| + | * Konzentriere Dich auf Lücke und fülle die "weissen Flecken". | ||
| + | * Fülle den Bereich zwischen dem Track mit der geringsten Tiefe und der Küste - wenn es Dein Tiefgang erlaubt. | ||
| + | * Alles zwischen 5 und 2 Meter ist besonders interessant! | ||
<gallery> | <gallery> | ||
| − | File:Palma-z-19.jpg|Tankstelle in Palma | + | File:Palma-z-19.jpg|[http://map.openseamap.org/?zoom=18&layers=BFTFFFTFFTF0FFFFFTFF&lang=de&lat=39.56436&lon=2.63404 Tankstelle in Palma] |
GPS-Genauigkeit yx-Abweichung.jpg|Punktewolke | GPS-Genauigkeit yx-Abweichung.jpg|Punktewolke | ||
</gallery> | </gallery> | ||
== Erfassung unterwegs == | == Erfassung unterwegs == | ||
| − | Fahre deinen Törn wie gewohnt <br> | + | [[File:OpenSeaMap-Kunst.jpg|thumb|[http://map.openseamap.org/?zoom=17&lat=52.26679&lon=11.78631&mlat=52.26861&mlon=11.78343&mtext=%3Cb%3EOpenSeaMap%20-%20Kunst%3C%2Fb%3E&layers=BTTFFFTFFTF0FFFFFTFFFF OpenSeaMap-Kunst] ]] |
| + | |||
| + | Fahre deinen Törn wie gewohnt. <br> | ||
Der Track wird automatisch aufgezeichnet :-) | Der Track wird automatisch aufgezeichnet :-) | ||
Du kannst das Ergebnis optimieren: | Du kannst das Ergebnis optimieren: | ||
* fahre so '''nah ans Ufer''', wie es der Tiefgang erlaubt, <br>auch beim '''Kreuzen''' | * fahre so '''nah ans Ufer''', wie es der Tiefgang erlaubt, <br>auch beim '''Kreuzen''' | ||
| − | * fahre einen möglichst engen '''Kreis um Untiefen'''<br> und einen zweiten mit etwas Abstand <br>und wenn möglich auch zwischen zwei Untiefen durch | + | * fahre einen möglichst engen '''Kreis um Untiefen''' <br> und einen zweiten mit etwas Abstand <br> und wenn möglich auch zwischen zwei Untiefen durch |
| − | * besonders interessant sind '''Häfen, Buchten, Kaps''' <br>wenn also eine solche Stelle am Weg liegt: nimm sie mit... | + | * besonders interessant sind '''Häfen, Buchten, Kaps''' <br> Inseldurchfahrten, Ansteuerungen <br> wenn also eine solche Stelle am Weg liegt: nimm sie mit... |
* mache viele '''Manöver in flachen Gewässern''' | * mache viele '''Manöver in flachen Gewässern''' | ||
* '''kreuze auch mal unter Motor''' im Flachwasser | * '''kreuze auch mal unter Motor''' im Flachwasser | ||
| − | Manchmal hilft einfach ein Schlenker | + | Manchmal hilft einfach ein zusätzlicher Schlenker... |
Interessante Stellen systematisch abfahren (Hafenrunde, Ankerplatz suchen, zwischen Bojen und ankernden Schiffen durchfahren) <br> | Interessante Stellen systematisch abfahren (Hafenrunde, Ankerplatz suchen, zwischen Bojen und ankernden Schiffen durchfahren) <br> | ||
Fahre so nah ans Ufer und an Untiefen wie es der Tiefgang erlaubt. <br> | Fahre so nah ans Ufer und an Untiefen wie es der Tiefgang erlaubt. <br> | ||
| − | Kreuzschläge und Manöver helfen eine breitere Spur zu erfassen | + | Kreuzschläge und Manöver helfen eine breitere Spur zu erfassen. |
Am Wichtigsten ist alles '''zwischen 2 und 10m'''. <br> | Am Wichtigsten ist alles '''zwischen 2 und 10m'''. <br> | ||
Wir werten alles aus zwischen 0 und 100m (200m). | Wir werten alles aus zwischen 0 und 100m (200m). | ||
| + | |||
| + | == Mit dem Schlauchboot == | ||
| + | [[Datei:Tender_Galeb.jpg|thumb|Mobile Messeinrichtung]] | ||
| + | Mit einem [[OpenSeaMap-dev:HW-logger/Tiefenmesser_mobil|Schlauchboot, das mit mobilem GPS und Echolot ausgerüstet ist]], kann man auch sehr flache Stellen messen. Ideal im Hafen und in der Ankerbucht. Kinder und Jugendliche nutzen die Liegezeit gern für solche Schlauchbootfahrten! | ||
| + | |||
== Zur Technik == | == Zur Technik == | ||
* http://depth.openseamap.org/#introduction | * http://depth.openseamap.org/#introduction | ||
| − | * siehe | + | * Weitere Seiten im Wiki: siehe Kasten oben rechts |
| + | |||
| + | [[Kategorie:Depth]] | ||
Aktuelle Version vom 24. Januar 2025, 21:46 Uhr
| Deutsch | English |
|---|
| Water depth |
|---|
| Depth-Website |
| Das Projekt |
| Mess-Strategie |
| NMEA-Daten hochladen |
| Metadaten Hilfe |
| NMEA-Logger anschliessen |
| Hardware Logger |
| Software-Logger |
| Mobiler Datenlogger |
| Bordnetz |
| Daten-Formate |
Miss einfach da wo Du gerade bist.
Du brauchst nichts Besonderes tun :-)
Schalte vor dem Start den Logger ein
und lass ihn nach der Ankunft noch eine halbe Stunde laufen.
Inhaltsverzeichnis
Systematische Erfassung
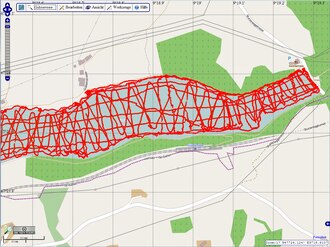
Deinen Heimathafen und die Ansteuerung dazu erfasst du am besten systematisch.
Auch bei der Erfassung einer Ankerbucht, einer Badebucht, eines Bojenfeldes hilft etwas Systematik.
- Wichtig
- fahre so nahe an das Ufer, wie es dein Tiefgang erlaubt
- fahre so nahe an jede Untiefe, wie es dein Tiefgang erlaubt
- fahre parallele Linien im Abstand von 10..50m
- markiere Untiefen auf der Karte
Chaotische Erfassung

In Gebieten wo viele Skipper unterwegs sind (beispielsweise an der Tankstelle in Palma, Mallorca), ergibt sich durch Crowdsourcing automatisch eine dichte Erfassung. An der Rändern der viel befahrenen Wege ist die Punktedichte naturgemäss geringer. Da hilft dann etwas mehr Systematik.
Lass am Liegeplatz, am Steg oder schwojend am Ankerplatz eine Punktewolke entstehen. Das hilft uns, die Daten zu kalibrieren.
Wenn es in deinem Revier schon Mess-Tracks gibt:
- Konzentriere Dich auf Lücke und fülle die "weissen Flecken".
- Fülle den Bereich zwischen dem Track mit der geringsten Tiefe und der Küste - wenn es Dein Tiefgang erlaubt.
- Alles zwischen 5 und 2 Meter ist besonders interessant!

Punktewolke


Erfassung unterwegs

Fahre deinen Törn wie gewohnt.
Der Track wird automatisch aufgezeichnet :-)
Du kannst das Ergebnis optimieren:
- fahre so nah ans Ufer, wie es der Tiefgang erlaubt,
auch beim Kreuzen - fahre einen möglichst engen Kreis um Untiefen
und einen zweiten mit etwas Abstand
und wenn möglich auch zwischen zwei Untiefen durch - besonders interessant sind Häfen, Buchten, Kaps
Inseldurchfahrten, Ansteuerungen
wenn also eine solche Stelle am Weg liegt: nimm sie mit... - mache viele Manöver in flachen Gewässern
- kreuze auch mal unter Motor im Flachwasser
Manchmal hilft einfach ein zusätzlicher Schlenker...
Interessante Stellen systematisch abfahren (Hafenrunde, Ankerplatz suchen, zwischen Bojen und ankernden Schiffen durchfahren)
Fahre so nah ans Ufer und an Untiefen wie es der Tiefgang erlaubt.
Kreuzschläge und Manöver helfen eine breitere Spur zu erfassen.
Am Wichtigsten ist alles zwischen 2 und 10m.
Wir werten alles aus zwischen 0 und 100m (200m).
Mit dem Schlauchboot

Mit einem Schlauchboot, das mit mobilem GPS und Echolot ausgerüstet ist, kann man auch sehr flache Stellen messen. Ideal im Hafen und in der Ankerbucht. Kinder und Jugendliche nutzen die Liegezeit gern für solche Schlauchbootfahrten!
Zur Technik
- http://depth.openseamap.org/#introduction
- Weitere Seiten im Wiki: siehe Kasten oben rechts