De:NASA Clipper Range: Unterschied zwischen den Versionen
Markus (Diskussion | Beiträge) K (→Steckerbelegung) |
Markus (Diskussion | Beiträge) K (→Steckerbelegung) |
||
| Zeile 16: | Zeile 16: | ||
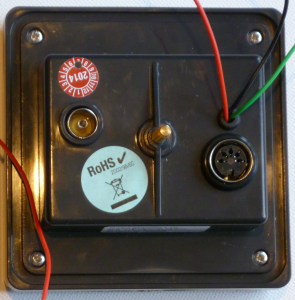
Der Datenausgang ist ein ein 5-poliger [[Wikipedia:de:DIN-Stecker | DIN-Stecker]], siehe auch [[http://mhv.bplaced.de/test/dinstecker]]. Das Aussehen des Steckers sowie die Nummerierung der Pins sind rechts dargestellt. Die Pinbelegung ist dabei folgende: | Der Datenausgang ist ein ein 5-poliger [[Wikipedia:de:DIN-Stecker | DIN-Stecker]], siehe auch [[http://mhv.bplaced.de/test/dinstecker]]. Das Aussehen des Steckers sowie die Nummerierung der Pins sind rechts dargestellt. Die Pinbelegung ist dabei folgende: | ||
| − | {| | + | {| class="wikitable" |
!| Pin || Belegung | !| Pin || Belegung | ||
|- | |- | ||
Version vom 21. August 2014, 11:12 Uhr
Inhaltsverzeichnis
NASA Clipper Depth
- NASA Clipper Depth Echolot

Frontansicht
Rückansicht


Im Vergleich zu den meisten anderen Echoloten ist das Besondere des NASA Clipper Depth Echolots die Datenübertragung der Tiefendaten zu einem Tochterdisplay. Es wird dabei nicht ein standardisiertes Protokoll wie etwa NMEA-0183 oder ähnliches benutzt, sondern ein I2C Bus, der über den I2C Bus direkt mit dem LCD-Treiber des Tochterdisplays kommuniziert. Diese Seite zeigt wie man die I2C-Daten dekodieren und in NMEA-0183 umwandeln kann.
Steckerbelegung


Der Datenausgang ist ein ein 5-poliger DIN-Stecker, siehe auch [[1]]. Das Aussehen des Steckers sowie die Nummerierung der Pins sind rechts dargestellt. Die Pinbelegung ist dabei folgende:
| Pin | Belegung |
|---|---|
| 1 | SCL (serial clock) |
| 2 | GND |
| 3 | SDA (serial data) |
| 4 | 12V |
| 5 | GND |
Datenübertragung
Die Leitungen SDA, SCL sind in dem Tochterdisplay mit einen Komparator (LM393) verbunden. Dieser wandelt die, durch die Abschlusswiderstände abgeschwächten Signale, wieder in 5V Signale um. Die Daten des LM393 werden an einen Microcontroller (PIC16F84A) gegeben, der diese an den LCD-Treiber (PCF8566P) weitergibt. Als Endanwender sind dabei zwei Dinge zu beachten:
- Wenn kein Tochterdisplay angeschlossen ist, sind die Ausgangsspannungen im Bereich 0-5V, es muss also kein Komparator benutzt werden.
- Das Echolot (der I2C Master) erwartet keinen Empfänger und sendet nach jedem Byte automatisch das ACK-Bit mit. Das Auslesen der Daten kann daher sowohl passiv als auch als ein normaler I2C slave stattfinden.
Datenformat

Jeder I2C Datensatz besteht aus 7 Adressbits, einem write bit (Byte 0) und 10 Datenbytes (Bytes 1-11). Die Datenbytes 1-5 bleiben konstant, die auszuwertenden Nutzdaten sind in den Bytes 7-11:
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bedeutung | ADDR+WRITE | CMD | CMD | CMD | CMD | CMD | DATA | DATA | DATA | DATA | DATA | DATA |
| Inhalt | 0x3E+W = 0x7C | 0xCE | 0x80 | 0xE0 | 0xF8 | 0x70 | DATA | DATA | DATA | DATA | DATA | DATA |
Jedes einzelne Bit in Bytes 7-11 repräsentiert dabei ein Segment der LCD:

| Byte | LCD Bit 7 | LCD Bit 6 | LCD Bit 5 | LCD Bit 4 | LCD Bit 3 | LCD Bit 2 | LCD Bit 1 | LCD Bit 0 |
|---|---|---|---|---|---|---|---|---|
| 6 | 2d | 2c | 2e | 2g | 2f | 2b | 2a | DEPTH |
| 7 | 3a | SHALLOW | 3f | 3b | 3e | 3g | 3d | 3c |
| 8 | N.A. | N.A. | N.A. | N.A. | N.A. | N.A. | N.A. | FEET |
| 9 | DEZ. Punkt | METRES | N.A. | N.A. | N.A. | N.A. | N.A. | N.A. |
| 10 | N.A. | PFEIL L | 1a | DEEP | 1f | 1b | 1e | 1g |
| 11 | 1d | 1c | N.A. | N.A. | N.A. | N.A. | BLOCK | Pfeil R |